
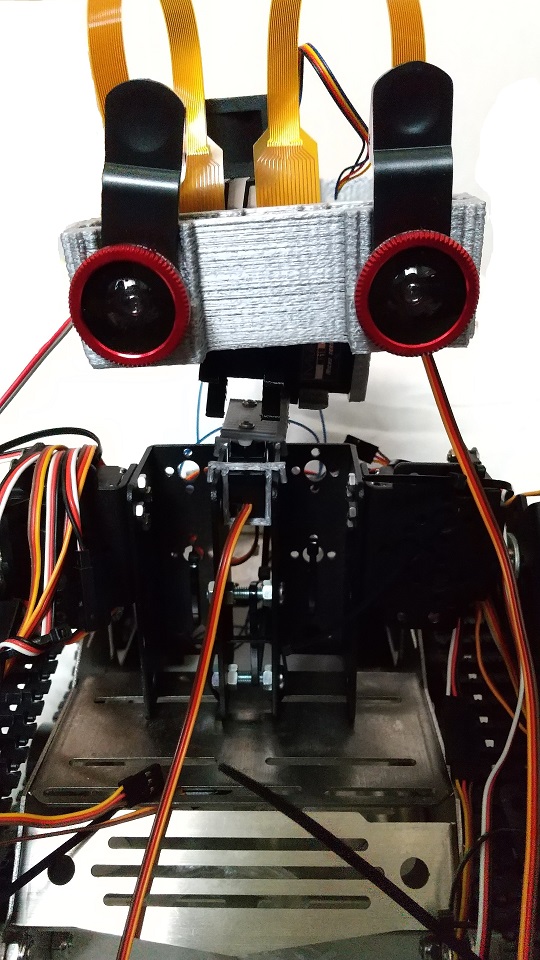
確認してみたが、首を下に倒さないと手元が見えない。首は必要そうだ。
月: 2024年3月
イメージ固め中
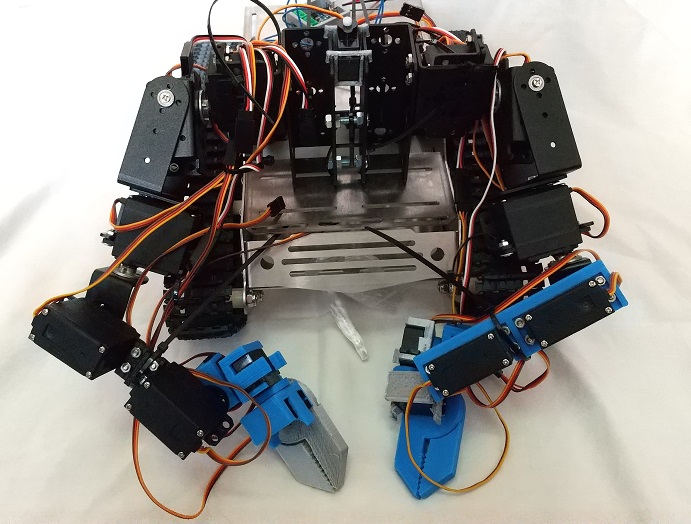
胴体部分はこんな感じここまではほぼ確定。
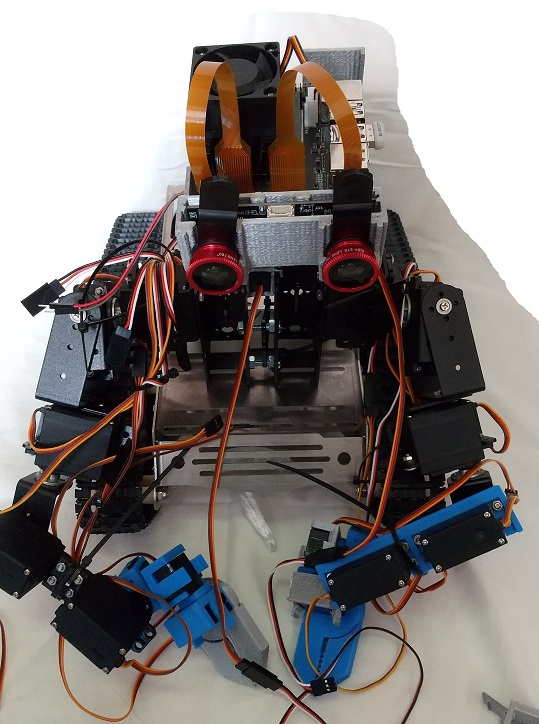
頭をとりあえず乗っけてみたイメージ。だいぶそれっぽくなってきた。
首が細すぎてちょっと不安。サーボのトルク的にも不安。
魚眼レンズのおかげで視野が広がっているので、首を着けなくても視野を確保できるのなら首を着けないのも選択肢。
PCA9685の連結での動作確認完了
PCA9685を連結して同じ電圧をかけての動作確認ができた。
一歩一歩進んでる感がある。
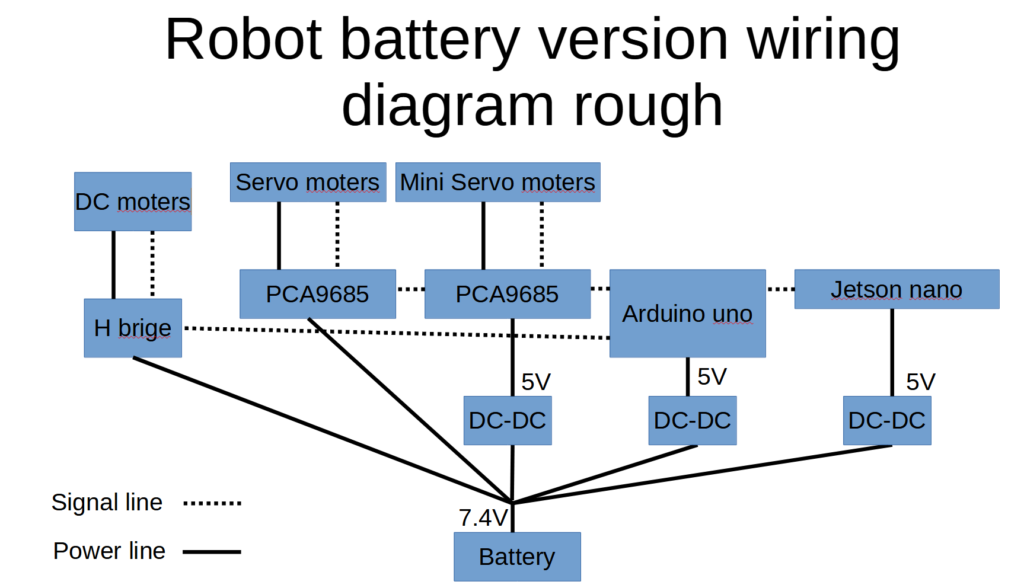
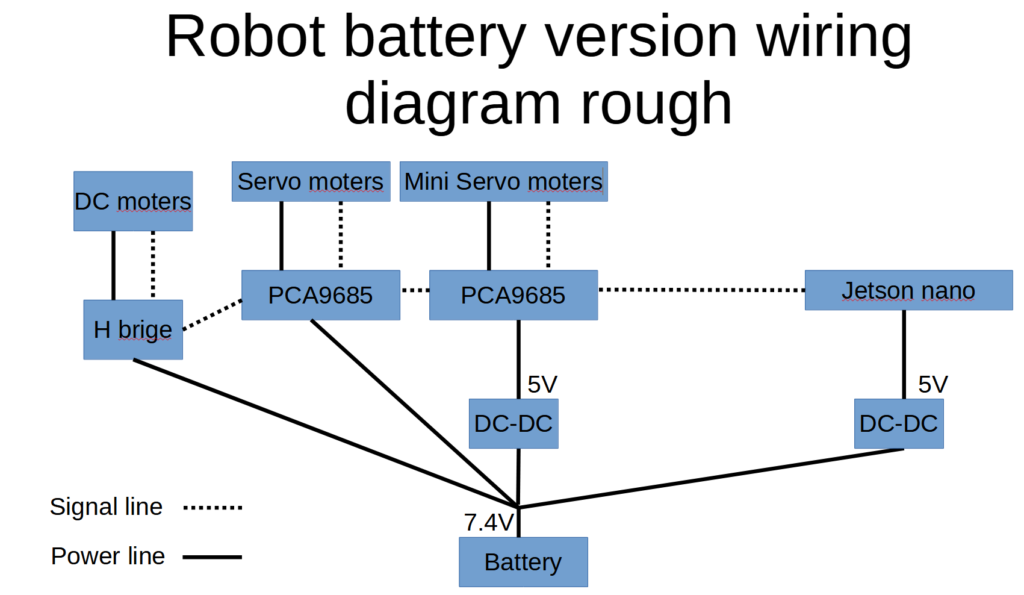
結線図のラフ
下でもいいのだろうけどこれまでの資産が生かせるうえでまずはやる。電圧が違うのがあるから、問題があってJetson nanoが壊れても困るというのもある。
DC-DC等の箱を作成
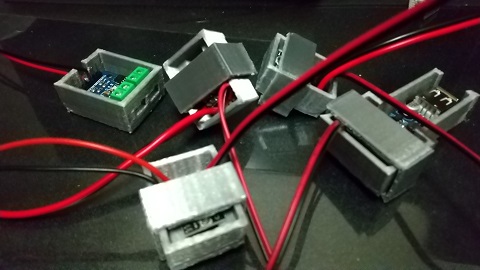
DC-DC等の箱を作成DC-DCを抑えてるクリップ(キャップ)部分が熱で溶けないが少し心配。データをアップロードはそういうのも含めてテストしてからのほうがよさそう。
Jetson Nanoのバッテリーからの起動に成功
へたくぞながらはんだ付け完了。Jetson nanoの起動をバッテリーで確認。
失敗して3Vしかでなくなってしまったコンバータは別の目的で勝ったアップコンバータと合わせてスピーカーの電源にする。スピーカの消費電力には若干足りないがまあスピーカーなら音が少し小さくなるくらいで済むだろう。
あと、これを入れる箱が必要だな。
 DSC_0006 DSC_0006 | 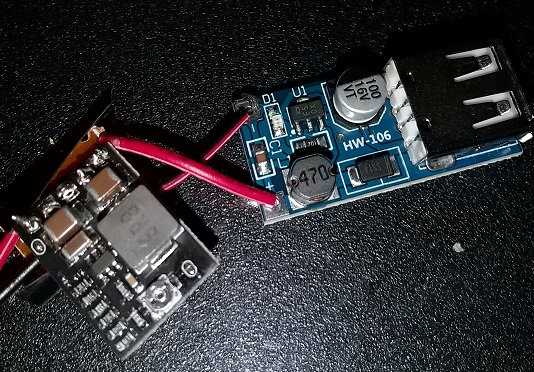 DSC_0007 DSC_0007 |
電源のバッテリー化
現在、移動機能をつけるために、電源のバッテリー化のための作業を実施中。
ソース修正
CustomMjpeg.py、publisher_member_function.pyを修正
CustomMjpeg.pyはデータサイズを小さくするところのストリームスクリプトが間違っていてエラー出していたのを修正。
publisher_member_function.py はタイマーのインターバルと画像サイズの部分を修正
複合要因だったようだ
どうやら遅延は複合要因だったようだ。主な原因は以下の二つ。
- タイマーのインターバルが遅い
- 送信データが大きすぎる。
まず以下の状態の時遅延はほとんどない。
- タイマーのインターバル 0.016
- 送信データのサイズを640 X 360
- カメラからの入力フレームレート30fps
1といえる理由としてうまくいく状態からタイマーのインターバルを0.1にしたとき遅延が発生した。
2といえる理由としてうまくいく状態から、送信データを1280 X 720 としたとき遅延が発生した。また、640X320のままでもデータの受け手をふやす(unityでの表示とpythonでの直接表示を同時に起動)と遅延が発生した。
上手くいく状態からカメラの入力フレームレートを10fpsに落としても遅延派はとんどなかった。
これを踏まえてソースコートを修正する必要がある。
エンドポイントはあまり影響なさそう
endpointは影響なさそう。ただ、ダイレクトにウィンド作成して画像表示するノードとエンドポイントを経由して表示するノードを二つ同時に起動したら露骨にJetson nano側の処理が落ちた。”送信”が処理として重いのかも