
jetsonのカメラの最高解像度で映像を送信することに成功。さすがに重い。かくかくする。圧縮方法の見直しや解像度の見直しが必要かも。あとそれのめどがついたらVPNを使ってテスト。VPNのテストができたら遠隔操作ロボの基本的な技術検証は完了したことになる。そのあと音声周りかな。
月: 2023年7月
少しずつだけど進んでる
JetsonとPC間でROS2での接続を確認できた。
不具合修正
Jetsonでのシリアル通信確認中に不具合確認。ここにアップロードするときは当然動作確認してからなんだけど、時間おいて動かしてみたら動かなったなんてことがまあまあある。
Meta(Oculus)Quest で立体視しながら、コントローラーでロボットハンドの操作:ソースコード:ServoSupport.h , ServoSupport.cpp
#define SERBO_NUMBER (18) ->#define SERBO_NUMBER (16)
結局機材を買った。
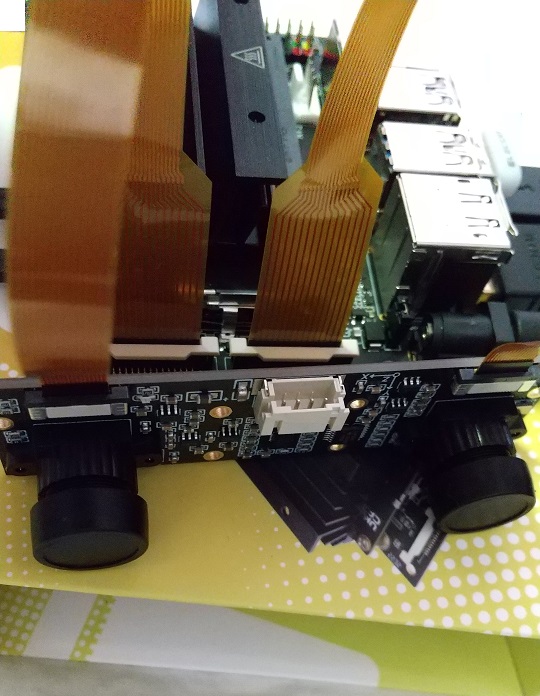
Jetson nano とそれにつなぐ4k*2を購入とりあえずやっと環境が整ってきた。
新しいものがあったほうがモチベーションが上がりやすい。