
月: 2023年3月
マニピュレータの位置合わせ若干考え方変えたほうがよさそう。
今マニピュレータの逆運動学は、手首の位置合わせたあと後、手の向きを合わせたているけど、これは逆にした方が、把持の位置を合わせる時一発できれいに合わせられる。もちろん手首の位置を合わせあってものだけど。
STL FreeCAD データ公開
ロボット胴体のポールの上下についている部品のデータ公開。ただあまりうまくいってない(ポール突っ込んだ際に割れたりしている)感じなので、環境に合わせて適当に調整してもらう必要があるかも。
なお使用しているのはダイソーの棚用のポール。47cmのやつ4つがメイン。
ちょっと一区切り感がある。
ここまででちょっと一区切り案がある。
今後の展開として考えられるのが、
- 1,はじめの予定通り、足回りを作る。シミュレーション環境を作る。
- 2,Jetson nano と 4kステレオカメラで解像度を上げる。
- 3,現状でAIを使った作業の自動化を進める。
ただ、足回りはバッテリーなどでお金がかかる。jetsonもしかり。シミュレーション環境と3を進めるのが最もコスパは良さそう。
決めるまで、まだ公開してないデータをまとめて公開したり、ブログ記事を充実させたりしとく感じかな。
角度を小数第2位まで送信するように修正
サーボモーターの角度を小数第2位まで送信するように修正これでサーボモーターの動作精度が上がるはず。
実際触ってみた感想としては確かに少し精度良く動いている”気”がします。
Meta(Oculus)Quest で立体視しながら、コントローラーでロボットハンドの操作
のソースコードや仕様の説明を更新しています。
ロボットでの作業映像
ロボットでペンを持ち替える映像。もう少し調整が必要。
首くみ上げ
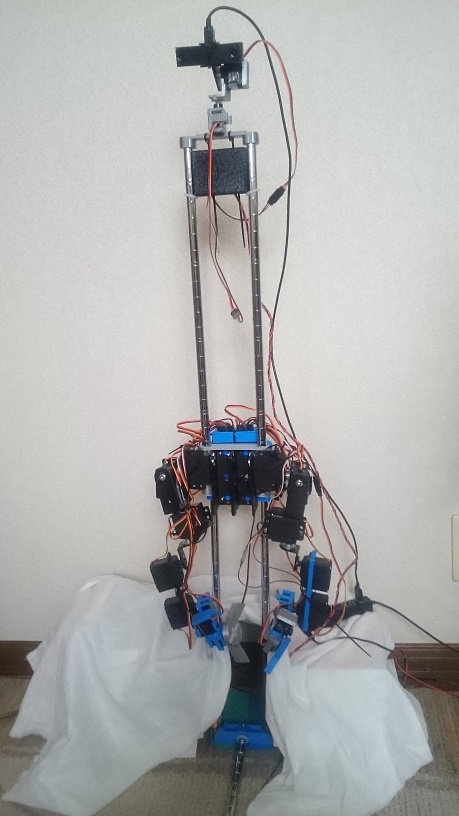
動作確認はまだだけど、とりあえず組んでみた。長い。外装デザインはキリンが首長竜かな。人ならろくろ首にしかなりそうにない。
腕の長さを長くしたりしたらまた変わってくるのだろうけど。
Meta(Oculus)Quest で立体視しながら、コントローラーでロボットハンドの操作のコンテンツ公開。
Meta(Oculus)Quest で立体視しながら、コントローラーでロボットハンドの操作のコンテンツを公開しました。
ソースコードでMeta(Oculus)Quest のコントローラーの動きでロボットの手の動きを制御と同じ部分はMeta(Oculus)Quest のコントローラーの動きでロボットの手の動きを制御のページにリンクしてあります。
これでやっと高さ調整に取り掛かれる。
ブログメニュー一部アコーディオン化
ブログのメニューの一部をアコーディオン化しました。
完全に満足する動きというわけで和ありませんが、元の長大なメニューよりましでしょう。