
※作業環境はwindows10です。
・ワークスペースのとなるファルダの作成
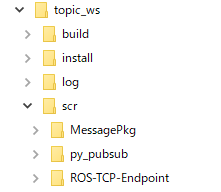
必要なパッケージは一つにまとめたほうが良い。特にメッセージのフォルダが、ROS-TCP-Emdpoint(UnityのEmdpoint)と同じところにないと、エンドポイントがメッセージファイルを見つけられない。
・gitコマンドでUnityのEndpointのクローン作製
-b main-ros2 がないとうまくコンパイルが通らなかった。
git clone -b main-ros2 https://github.com/Unity-Technologies/ROS-TCP-Endpoint・メッセージファイル作成
ROSのチュートリアル
https://docs.ros.org/en/galactic/Tutorials.html
を参考に作成する。
・パブリッシャーとサブスクライバー作成
上と同様にROSのシューとリアルを参考に作成する。
ただし、メッセージファイルを使用するサンプルは、メッセージファイル部分のチュートリアルを参考のこと
・ビルド
特記事項なし
・実行
特記事項なし