
初めの設置場所から400mmぐらい上に取り付けるのがよさそう。首の長さが胴体と同じくらいになるイメージ。ろくろ首……
最初は45度後方上方につけようとしたけど体が邪魔して作業場所が見えなかったので結局真上につけるしかなさそう。ただ作業するとき真下を見なくてはいけないので、コントローラーで首の上下回転はできるようしておく必要がある。
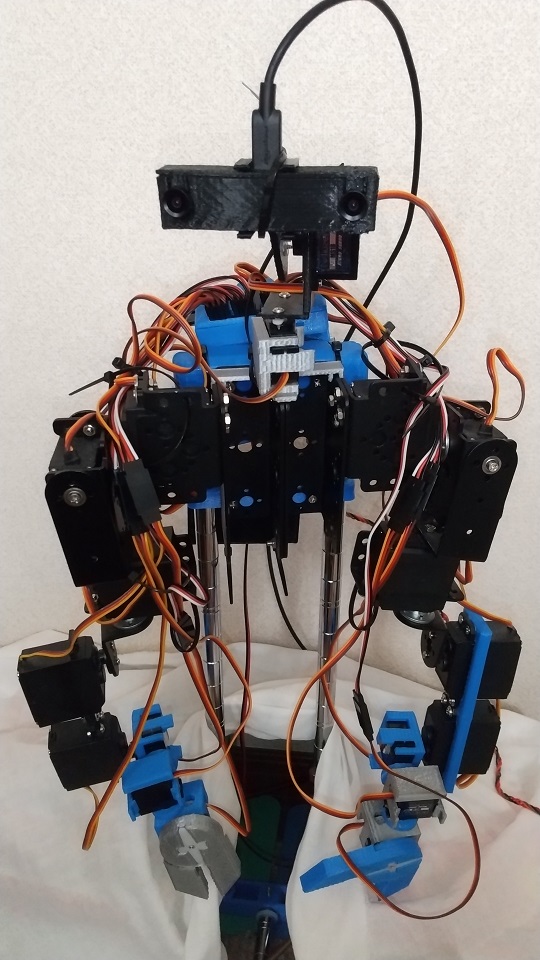
初めの設置場所から400mmぐらい上に取り付けるのがよさそう。首の長さが胴体と同じくらいになるイメージ。ろくろ首……
最初は45度後方上方につけようとしたけど体が邪魔して作業場所が見えなかったので結局真上につけるしかなさそう。ただ作業するとき真下を見なくてはいけないので、コントローラーで首の上下回転はできるようしておく必要がある。
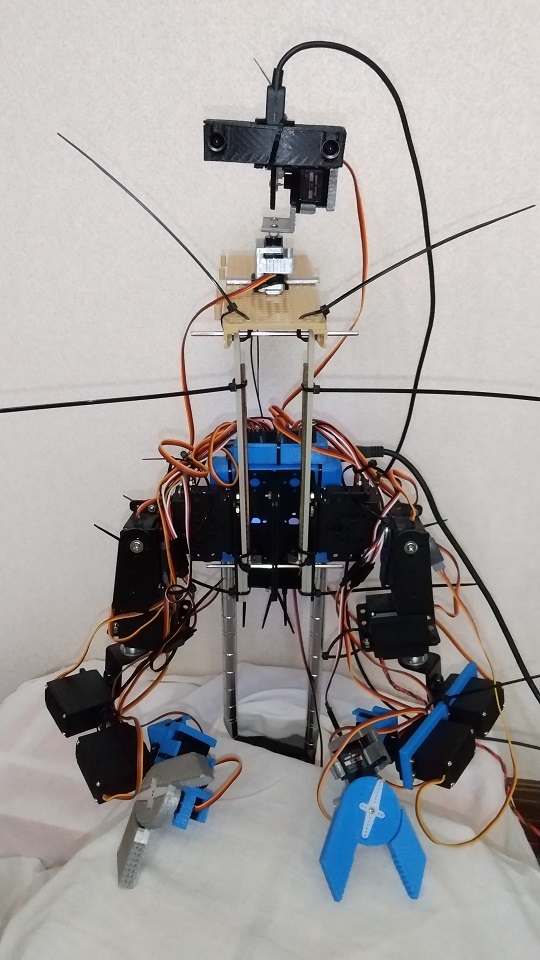
ここまで離してもまだ近い。この倍は欲しいと感じた。一度棚とかで位置を確認してから、それを採寸した方がよさそう

思いっきり伸ばした時に手の先がどうにか移る程度
最低でも肘、できれば肩が写るくらいの位置にしたい。
動作確認はまだしてない。
とりあえず、前書いた首(カメラホルダー)を動かすコードを無理やりぶち込んでみた。
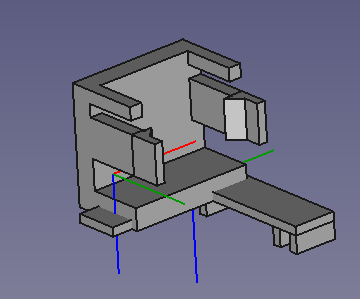
今首(カメラホルダー)のサーボを固定するパーツ作成中
STL FreeCAD data置き場をメニューの一番上になるように名前を変更。
グリッパーデータ STLとFreeCADのデータ公開しました。
新しいマウンターのデータも後悔しました。
FreeCAD の拡張子が特殊でこれまで、うまくブログにアップロードできなかったのだけれど、Zipにすればいいと気づいたのでzipにしてアップロードしました。
必要数印刷して、動作確認したらデータ公開というところで別メーカーのフィラメントへの交換。
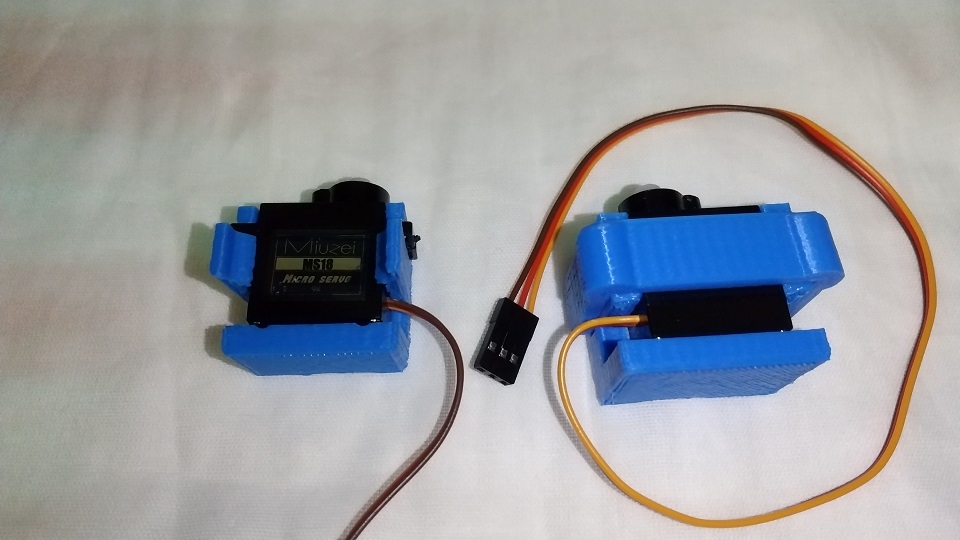
マウンターは左を採用。強度はちょっと不安だが、将来外装に組み込むとき何も考えず組み込めるため。