サーボモーターの角度を小数第2位まで送信するように修正これでサーボモーターの動作精度が上がるはず。
実際触ってみた感想としては確かに少し精度良く動いている”気”がします。
Meta(Oculus)Quest で立体視しながら、コントローラーでロボットハンドの操作
のソースコードや仕様の説明を更新しています。
サーボモーターの角度を小数第2位まで送信するように修正これでサーボモーターの動作精度が上がるはず。
実際触ってみた感想としては確かに少し精度良く動いている”気”がします。
Meta(Oculus)Quest で立体視しながら、コントローラーでロボットハンドの操作
のソースコードや仕様の説明を更新しています。
ロボットでペンを持ち替える映像。もう少し調整が必要。
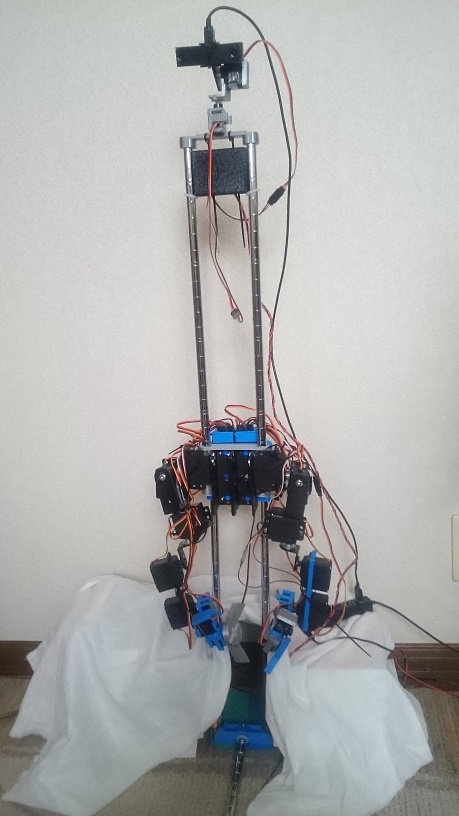
動作確認はまだだけど、とりあえず組んでみた。長い。外装デザインはキリンが首長竜かな。人ならろくろ首にしかなりそうにない。
腕の長さを長くしたりしたらまた変わってくるのだろうけど。
Meta(Oculus)Quest で立体視しながら、コントローラーでロボットハンドの操作のコンテンツを公開しました。
ソースコードでMeta(Oculus)Quest のコントローラーの動きでロボットの手の動きを制御と同じ部分はMeta(Oculus)Quest のコントローラーの動きでロボットの手の動きを制御のページにリンクしてあります。
これでやっと高さ調整に取り掛かれる。
ブログのメニューの一部をアコーディオン化しました。
完全に満足する動きというわけで和ありませんが、元の長大なメニューよりましでしょう。
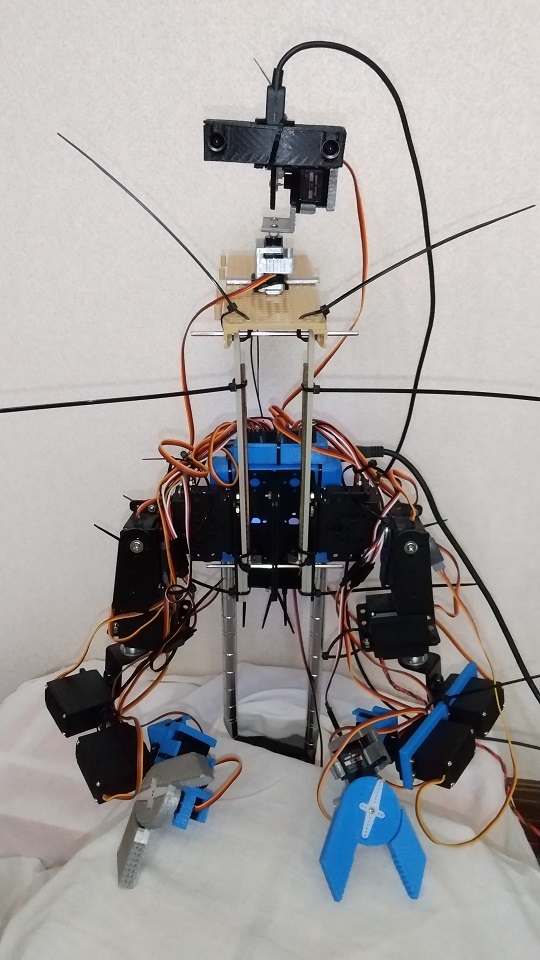
初めの設置場所から400mmぐらい上に取り付けるのがよさそう。首の長さが胴体と同じくらいになるイメージ。ろくろ首……
最初は45度後方上方につけようとしたけど体が邪魔して作業場所が見えなかったので結局真上につけるしかなさそう。ただ作業するとき真下を見なくてはいけないので、コントローラーで首の上下回転はできるようしておく必要がある。
ここまで離してもまだ近い。この倍は欲しいと感じた。一度棚とかで位置を確認してから、それを採寸した方がよさそう

思いっきり伸ばした時に手の先がどうにか移る程度
最低でも肘、できれば肩が写るくらいの位置にしたい。
動作確認はまだしてない。
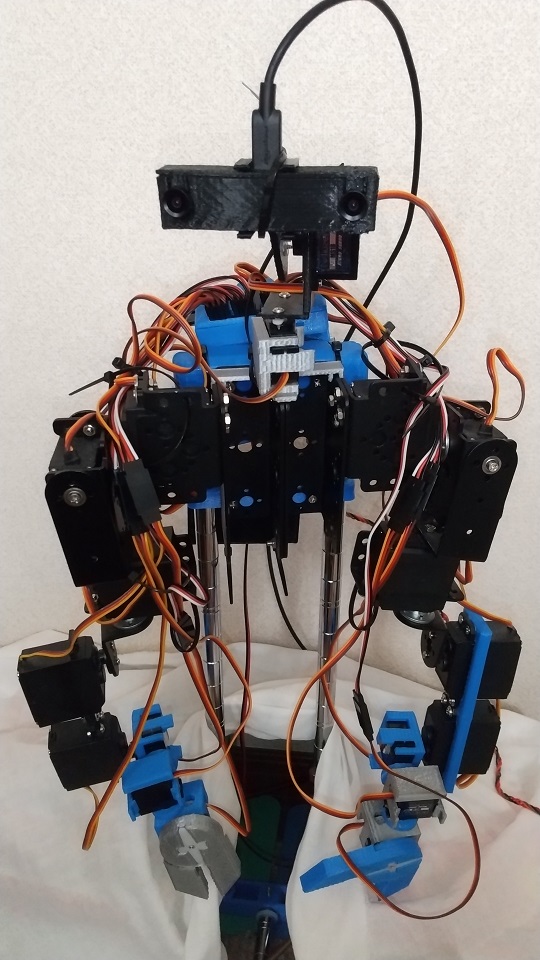
とりあえず、前書いた首(カメラホルダー)を動かすコードを無理やりぶち込んでみた。
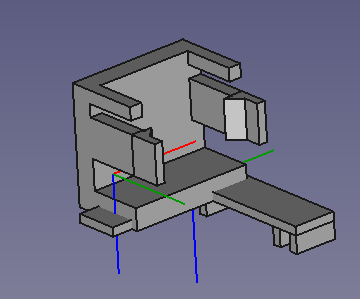
今首(カメラホルダー)のサーボを固定するパーツ作成中