
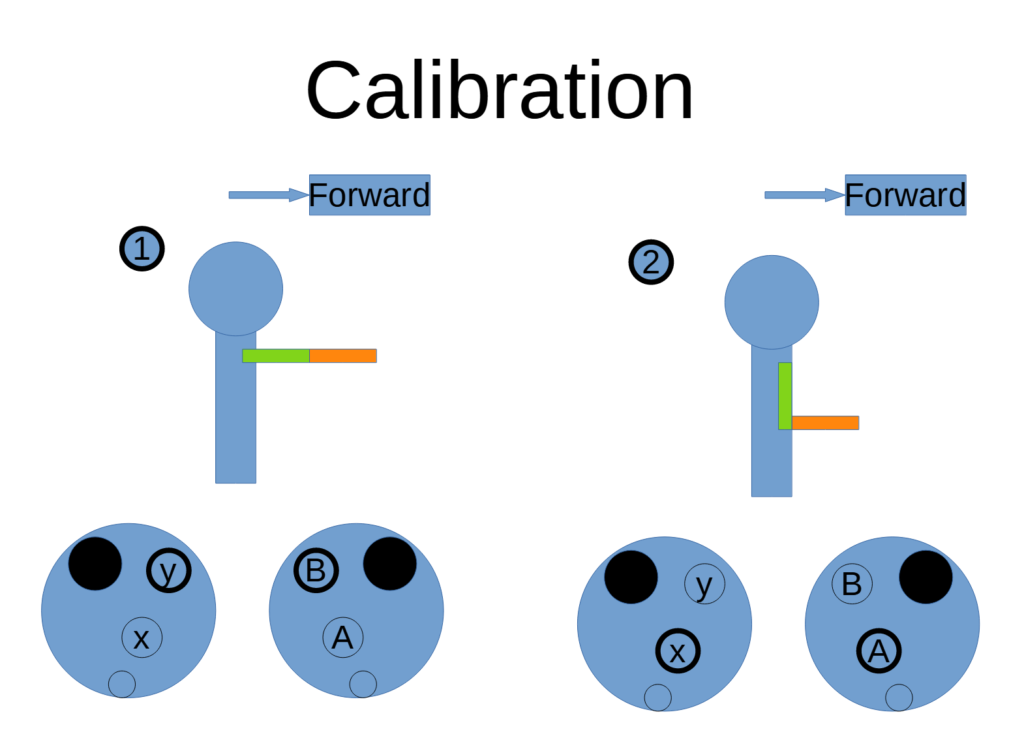
起動後初めにキャリブレーションを行います。これはロボットの腕の長さと人の腕の長の違いを確認するための処理です。上の図のような姿勢のロボットと、人の手の位置が合うように位置情報が調整されます。
キャリブレーションの手順は、腕を前方に出した状態でMeta(Oculus)のコントローラーのY,Bのボタンを押します。次に上腕を真下に下げ、肘を90度曲げた姿勢で、Meta(Oculus)のコントローラーのX,Aボタンを押します。そのあとは、ロボットの手首の位置がコントローラの位置になるように動き始めます。
ロボット(Arduiono)とPCの シリアル通信が切れた(PCからロボット(Arduino)にデータ送信後、3回レスポンスデータが、PCに送られてこなかった)場合再接続を試みます。再接続に成功するとすべてのモータがいったん脱力します。
キャリブレーション後、ロボット動作中にX,Y,A,Bいずれかのボタンを押すと、コントローラーの位置と、クウォータニオンの情報を表示(print)されます。特定の姿勢を再現するデバッグに使用済ます。
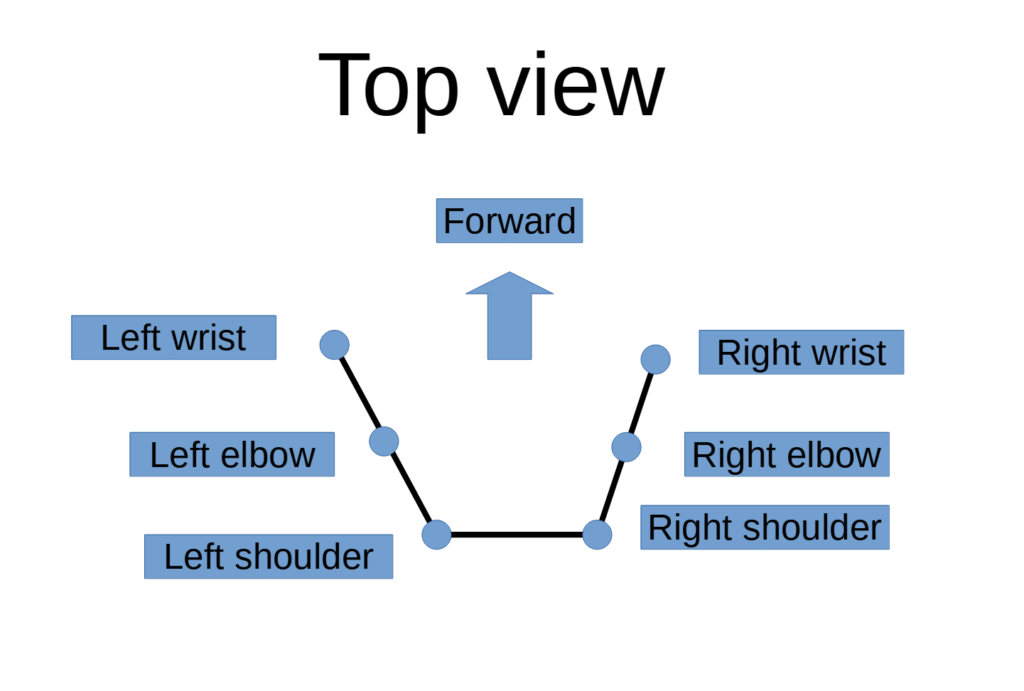
腕の動きは、肩、肘、手首が上面図で見た時に一直線になるようにしています。これは肘が横に出ると肘鉄を食らわせることになるとの考えからです。